

联芯智能科技(山东)有限公司
联系人:吴经理
手机:15376400661
邮箱:whm316@126.com
网址:www.lianxinzn.com
地址:山东省济南市高新区经十路7000号汉峪金融商务中心五区1号楼641







| 微处理器 | ATmega328P | 编程语言 | C语言 | ||||||
| 电源方案 | 两节18650电池(8.4V) | 续航时间 | 约90分钟 | ||||||
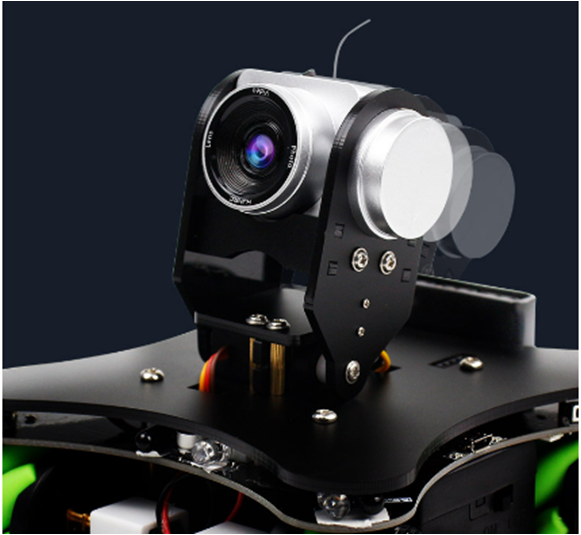
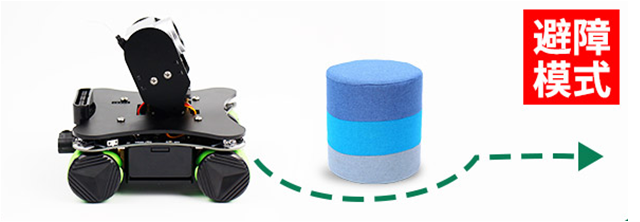
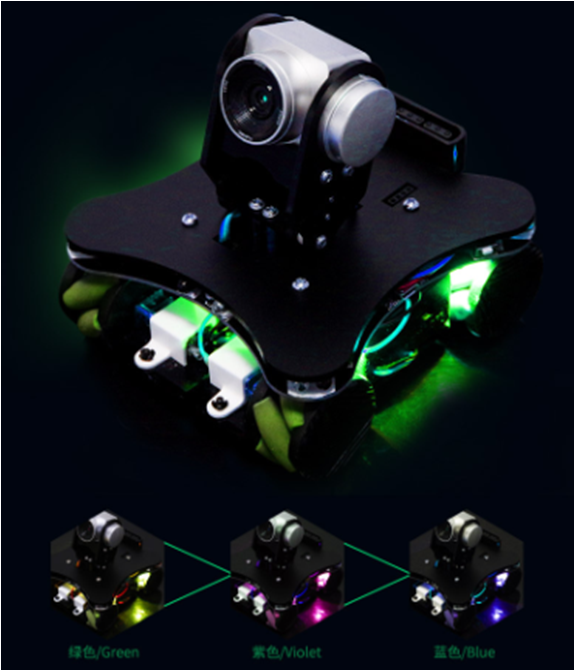
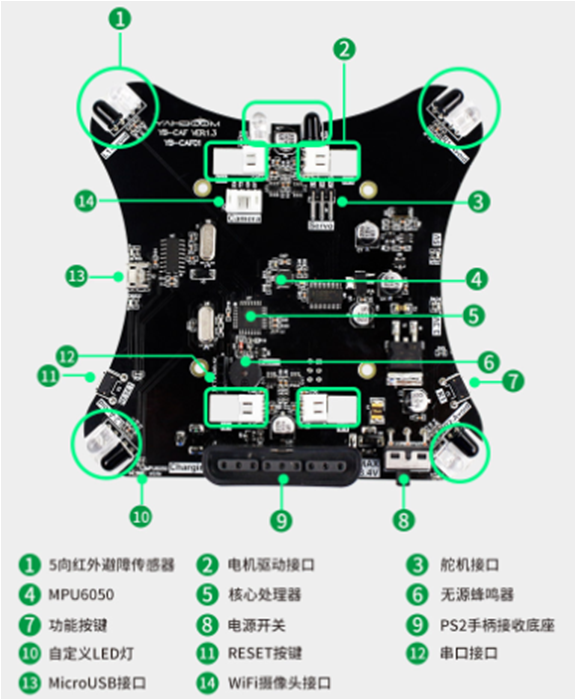
| 云台转动 | 舵机控制摄像头上下转动 | 避障方式 | 五向红外避障传感器 | ||||||
| 姿态校准 | 陀螺仪姿态校准 | RGB灯 | 四颗全彩RGB灯 | ||||||
| 电机驱动 | 单路持续输出电流0.8A (Max:1.8A) |
遥控方式 | 手机APP遥控(WIFI摄像头) PS2手柄遥控 |
||||||
| 电机型号 | N20减速电机 | 安全保护 | 过流保护,低电压保护,防反接保护 | ||||||
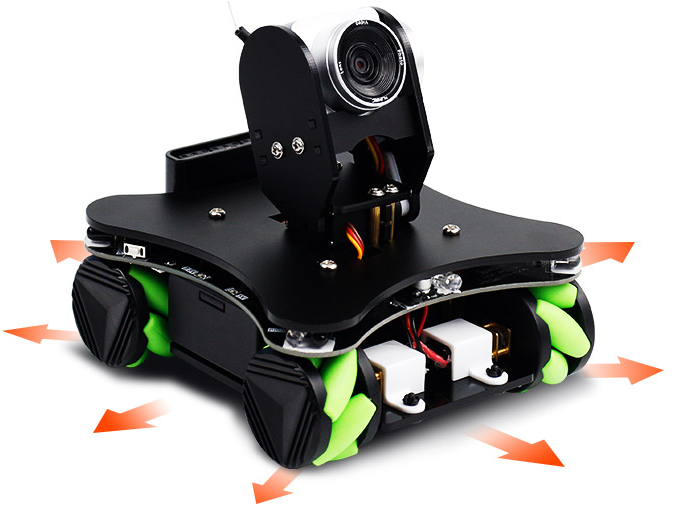
| 小车轮胎 | 全向麦轮 | 通讯方式 | 串口通讯 | ||||||
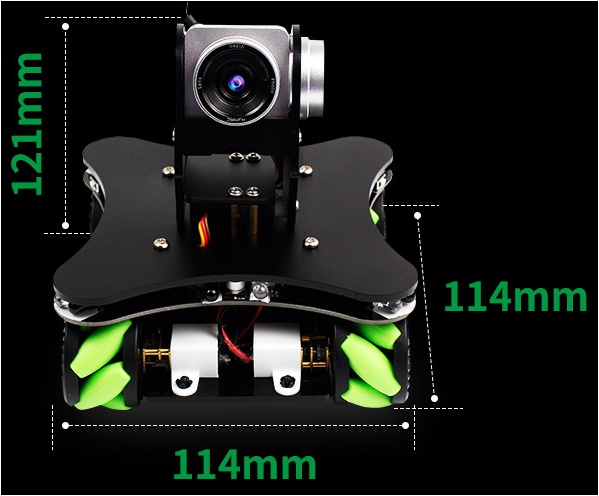
| 组装尺寸 | 114*121*114(mm) | 组装重量 | 422g | ||||||
物品清单



| 1 | 麦克纳姆轮运动原理 | 2 | 小车前进 | ||||||
| 3 | 小车前后左右运动 | 4 | 小车斜向45°运动 | ||||||
| 5 | 小车偏移运动 | 6 | WIFI摄像头控制小车运动 | ||||||
| 7 | 增加控制斜45°运动 | 8 | 增加调节车速和控制舵机角度 | ||||||
| 全向小车进阶课程 | |||||||||
| 1 | MPU6050简介 | 2 | PID算法简介 | ||||||
| 3 | MPU6050校准运动方向 | 4 | 绚丽的RGB灯 | ||||||
| 5 | 会唱歌的蜂鸣器 | 6 | 小车避障模式 | ||||||
| 7 | 小何环绕模式 | 8 | 小车平移模式 | ||||||