联芯智能科技(山东)有限公司
联系人:吴经理
手机:15376400661
邮箱:whm316@126.com
网址:www.lianxinzn.com
地址:山东省济南市长清区创新谷一号孵化器Z-2座206-13
Arm 服务机器人实践平台
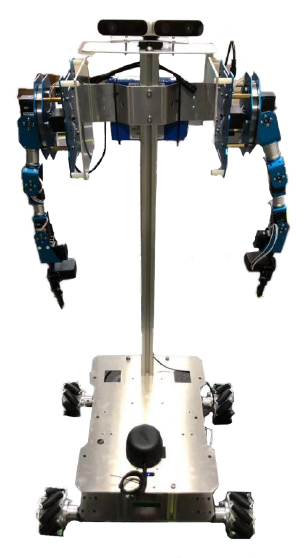
XARM 机器人开发套件是专为开发者、高等院校学生精心打造的学习和应用基于 ROS 操作系统的计算机视觉 SLAM,人机交互,机械臂控制交叉融合的开发套件。整个开发套件包括激光slam 和视觉 slam;人脸识别和语音交互;机械臂控制和人机交互;各部分互相支撑、互为补充。
该机器人机械动力部分采用四驱动差速模型,可原地转向;SLAM 算法基于激光雷达和深度摄像头;基于 EAIDK-610 的 Tengine 加速引擎,采用深度学习方法实现人脸识别,语音交互,人机交互等智能机器人功能。适用于轮式巡检机器人、室内服务机器人,自动化系统等应用场景。此套件可用于各种 ROS 算法的验证,人机交互服务机器人原型验证,也可作为教育方向的 SLAM 算法,智能控制系统,视觉算法,语音算法交叉融合领域的教学开发平台。
服务机器人系统由三个单元组成:
? EAIDK-610:边缘测智能单元,在嵌入式人工智能主控端被广泛使用,如室内扫地机器人、视觉算法系统,服务机器人,AGV 小车,工业自动化控制等领域;
? 套件整合了 ROS 机器人操作系统平台,融合了多种传感器,将多种算法与传感器进行融合,集软硬件平台和算法为一体的开发学习平台;
? 套件提供的完整的 slam 算法、路径规化导航避障算法、多传感器数据融合示例,自动化控制示例,视觉控制示例等。
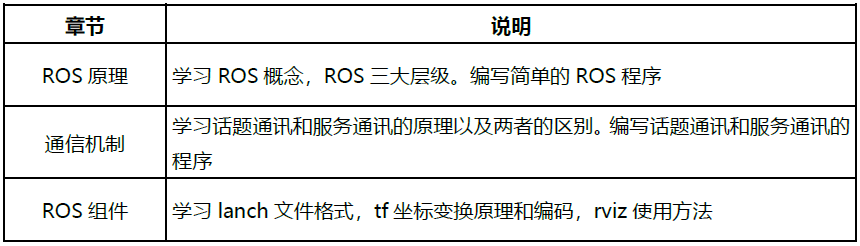
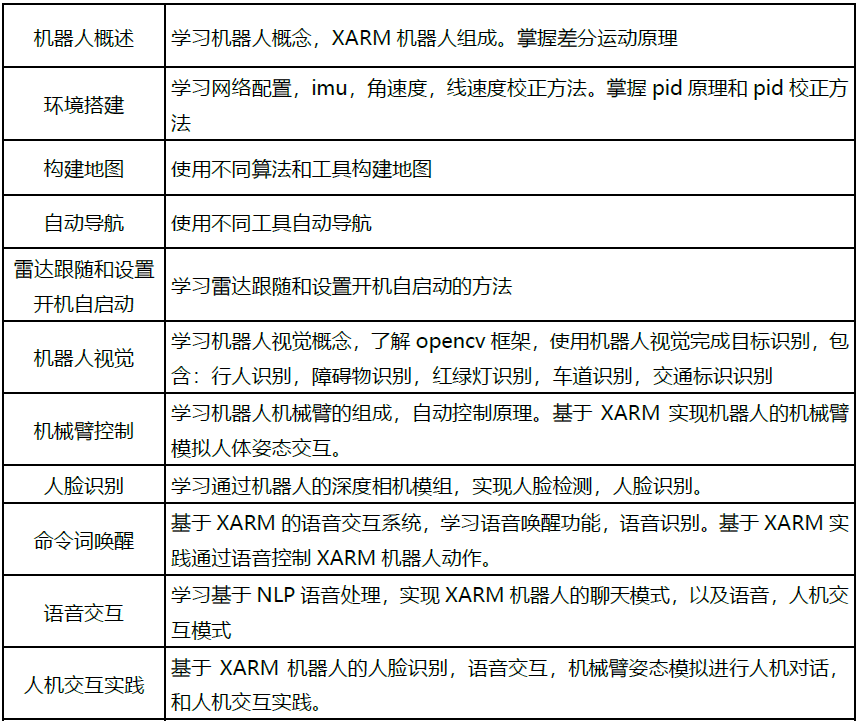
课程大纲: